Flugrichtungsbestimmung
Klaus von der Heide
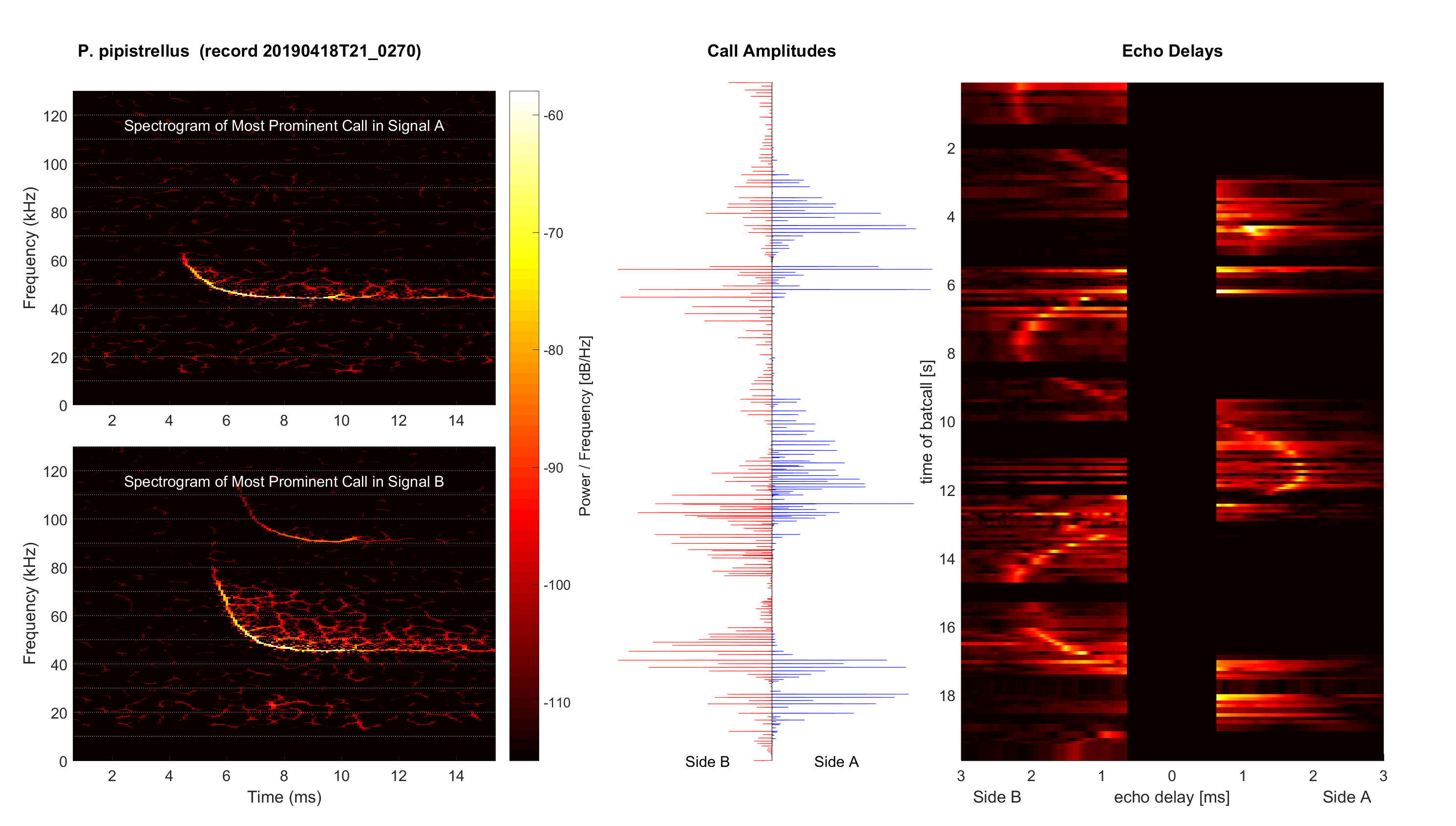
Nachfolgend wird ein einfacher Versuchsaufbau zur groben Flugrichtungsbestimmung beschrieben. Er besteht aus einer ebenen Fläche, die senkrecht auf dem Boden montiert wird, und je einem Mikrofon im Abstand von d = 40 cm von der Fläche auf beiden Seiten. Im Versuch wurde eine alte Tür verwendet:

Die Tür dient als Reflektor. Ein von der rechten Seite (Seite A) einfallender Fledermausruf liefert ein Echo am Mikrofon A, aber nicht bei B. In einem Sektor direkt über der Tür gibt es weder bei A noch bei B ein Echo. Die Echoverzögerungen der Rufe ergeben sich aus der Autokorrelation der Rufe. Die Autokorrelation ist für beide Mikrofone in den folgenden zwei Bildern jeweils rechts dargestellt mit einem schwarzen Balken in der Mitte, der dem Sektor ohne Reflexion entspricht. Die Zeit läuft von oben nach unten. In der Mitte sind die Rufamplituden für beide Mikrofone angegeben. Daran erkennt man, dass es sich auf beiden Seiten um denselben Ruf handelt - oder auch nicht wie beim ersten Bild bei 0.5 s und bei 1.0 s. Das erste Bild zeigt eine überfliegende Wasserfledermaus, das zweite eine im Garten jagende Zwergfledermaus, die die Anordnung mehrfach überfliegt: